
| Startete: | 2011 |
| Ansprechpartner: | Kristian Manthey |
| Mitarbeiter: | Dominik Rueß, Kristian Manthey, Andreas Luber, Jan Hieronymus, Ralf Reulke |
Im Rahmen dieses Projektes wurden für die Firma  Hella Aglaia Mobile Vision GmbH
jeweils 5 Stereokameras mit 90° und 120° Öffnungswinkel (2,9 mm bzw. 2,2 mm Brennweite)
geometrisch kalibriert. Eine möglichst genaue geometrische Kalibrierung der Kameras ist
Voraussetzung z.B. für das Stereo-Matching, welches später in der Kamera durchgeführt
werden soll. Die Kalibrierungsparameter, die am Ende des Projektes als Ergebnis entstanden
sind, dienen zum einen als Referenz für die hauseigene Kalibrierung als auch zur Verifikation
und Weiterentwicklung der Stereo-Kameras.
Hella Aglaia Mobile Vision GmbH
jeweils 5 Stereokameras mit 90° und 120° Öffnungswinkel (2,9 mm bzw. 2,2 mm Brennweite)
geometrisch kalibriert. Eine möglichst genaue geometrische Kalibrierung der Kameras ist
Voraussetzung z.B. für das Stereo-Matching, welches später in der Kamera durchgeführt
werden soll. Die Kalibrierungsparameter, die am Ende des Projektes als Ergebnis entstanden
sind, dienen zum einen als Referenz für die hauseigene Kalibrierung als auch zur Verifikation
und Weiterentwicklung der Stereo-Kameras.
Bei der verwendeten Methode zur Kalibrierung wird ein Testobjekt (Target) aus verschiedenen Richtungen und unter unterschiedlichen Rotationswinkeln aufgenommen. Das Target enthält hochgenau vermessene Referenzpunkte, welche später in den Bildern lokalisiert werden und mittels einer Ausgleichsrechnung die Parameter der inneren Orientierung liefern. Zur Beschreibung der inneren Orientierung der Kameras werden Abbildungs- sowie Verzeichnungsmodelle verwendet.
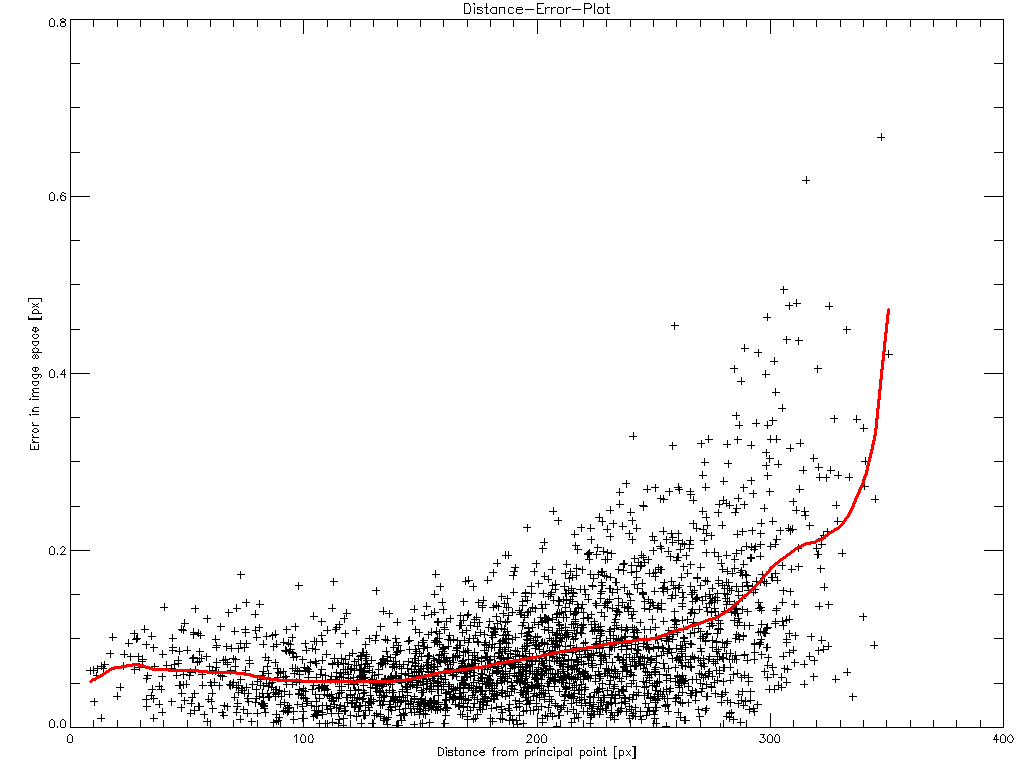
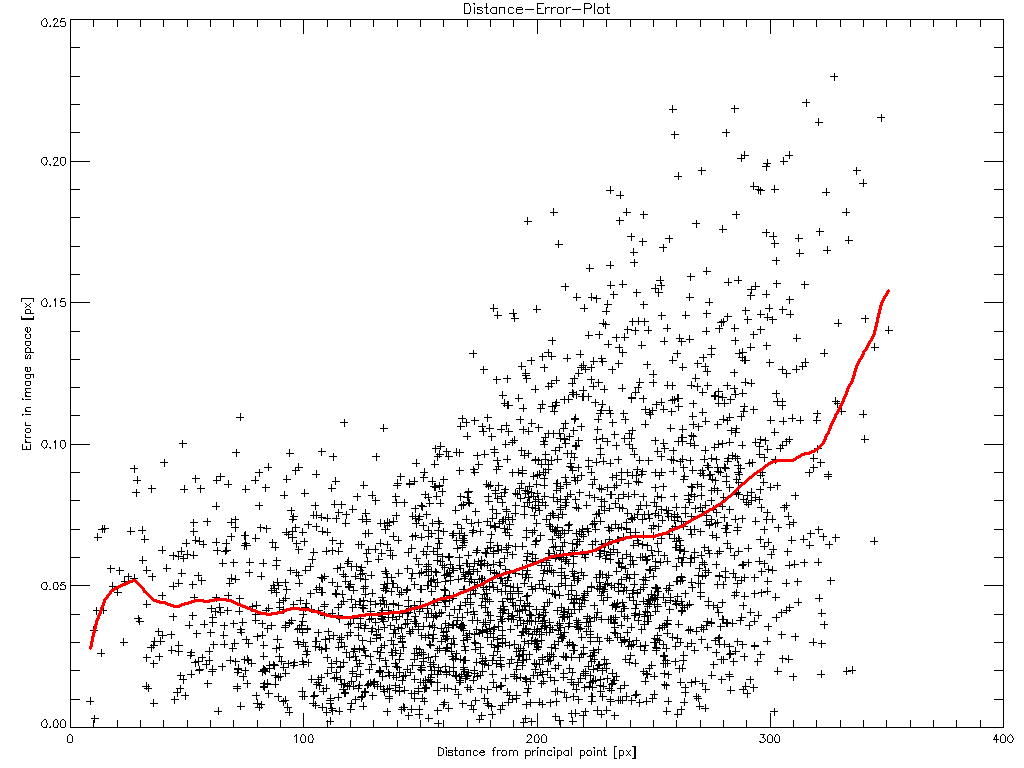
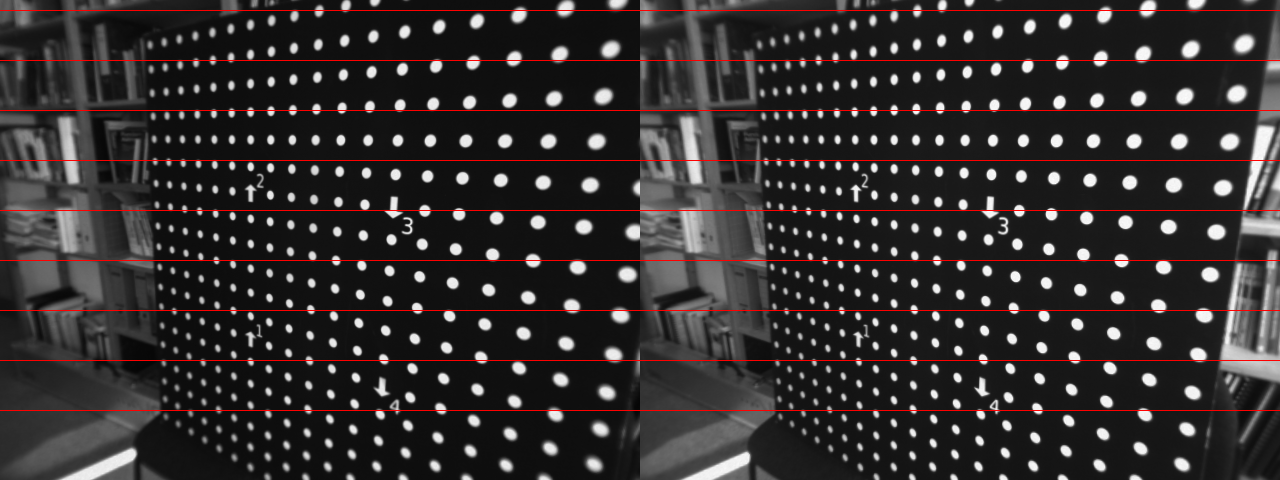
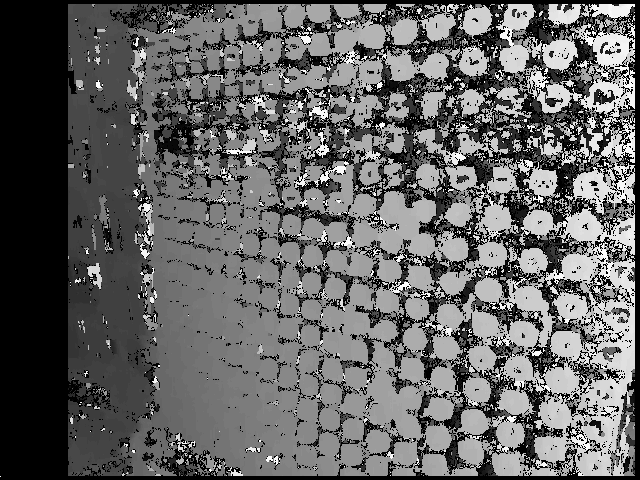
In diesem Projekt wurde zur Kalibrierung zunächst das perspektivische Abbildungsmodell sowie das Verzeichnungsmodell nach Brown verwendet. Es hat sich gezeigt, dass diese Kombination für die Kameras mit 2,2 mm Brennweite weniger gut geeignet ist, da die Abbildung nicht dem perspektivischen Modell entspricht und etwaige Abweichungen über das Verzeichnungsmodell ausgeglichen werden müssen, dies jedoch nicht mehr ausreichend möglich ist (Abbildung 1, links). Aus diesem Grund wurde die Kalibrierung für die Kameras zusätzlich mit einem orthografischen Abbildungsmodell durchgeführt (Abbildung 1, rechts). Zu Verifikation der Kalibrierungsergebnisse wurden die Bilder rektifiziert (Abbildung 2) und anschließend mit dem OpenCV StereoSGBM die Disparitätenkarte bestimmt (Abbildung 3).
|
|
| Abbildung 1: Fehler nach Kalibrierung in Abhängigkeit vom Abstand zum Hauptpunkt. Der obere Plot zeigt den Fehler bei Verwendung des perspektivischen Abbildungsmodells, während der untere Plot den Fehler mit dem orthogonalen Abbildungsmodell zeigt. |
|
| Abbildung 2: Zu sehen sind die rektifizierten Bilder von linker und rechter Kamera mit einigen (exemplarischen) Epipolarlinien. |
|
| Abbildung 3: Die Disparitätenkarte zu den in Abbildung 2 gezeigten Bildern. |


© 2026 - Computer Vision, Institut für Informatik, HU Berlin - - Impressum