IQ-Calib (automated geometric and rediometric calibration of industrial cameras)
| Started in: | 2012 |
| Contact person: | Ralf Reulke, Martin Misgaiski-Hass, Jan Hieronymus |
| Staff involved: | Ralf Reulke, Jan Hieronymus, Martin Misgaiski-Hass |
| Erstellung eines Messplatzes zur automatisierten geometrischen und radiometrischen Kalibrierung von Industriekameras. |
Für das Projekt IQCalib müssen systematische Eigenschaften von der verwendeten Kameras berücksichtigt und normalisiert werden.
Im Rahmen dieses Projektes wird eine Musterkamera eingehend untersucht, um typische Eigenheiten des Kameratyps zu erforschen.
In einem zweiten Schritt wird ein Messplatz konzipiert und aufgebaut, mit Hilfe dessen Kameras automatisiert kalibriert, also vermessen, werden können.
Untersucht werden unter anderem geometrische Eigenschaften (Verzeichnung) und radiometrische Eigenschaften (Dunkelstrom, Rauschen, Ungleichförmigekeit der Antworten auf Licht).
Zusätzlich wird auch die Ablage eines integrierter Lagesensors zur optischen Achse vermessen, um aus den Daten des Lagesensors eine direkte Georeferenzierung abzuleiten.
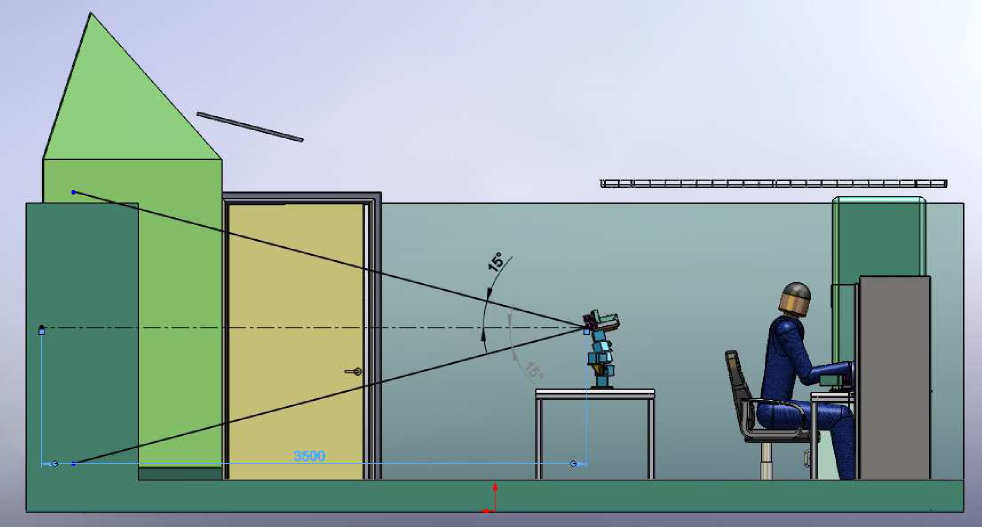 |
| Abbildung 1: Laboraufbau |
Für die geometrische Kalibration wurde eine Laborwand mit Klebepunkten versehen. Durch die statistische Verteilung der Punkte war es möglich eine Algorithmus zu entwickeln, der die Verwendung von codierte Marker überflüssig macht.
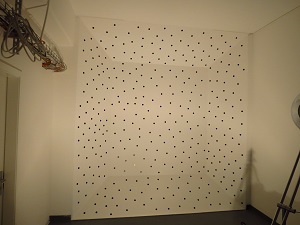 |
| Abbildung 2: Kalibrierwand |
Die in diesem Projekt verwendeten Kameras müssen auf unendlich fokussiert werden, hierzu wird klassischerweise ein Kollimator mit einem Target verwendet. Allerdings hätte ein professioneller Kollimator mit der benötigten Apertur und Brennweite das Budget weit übertiegen. Daher wurde ein Newton Spiegelteleskop zu einem Kollimator mit einer integrierten beleuchtungseinheit und fest verbauten Target umgebaut.
Für die geometrische Kalibration wurde eine Laborwand mit Klebepunkten versehen. Durch die statistische Verteilung der Punkte war es möglich eine Algorithmus zu entwickeln, der die Verwendung von codierte Marker überflüssig macht.
 |
| Abbildung 3: Kollimator |
Zur Flatfieldanalyse wurde eine LED Leuchtscheibe mit einer Kamerahalterung versehen um ein verrutschen zu verhindern. Die vorhandene Inhomogenität der LED Leuchtfläche konnte quantifiziert werden und im Auswerteverfahren kompensiert werden.
 |
,
 |
| Abbildung 4: Leuchtfläache |


