
| Ansprechpartner: | Ralf Reulke |
| Mitarbeiter: | Sascha Bauer, Martin Misgaiski-Hass |
| (In Zusammenarbeit mit dem DLR, Berlin-Adlershof) | |
Im Rahmen der Verkehrsforschung gibt es eine Reihe von Fragestellungen, die eine Visualisierung von Verkehrsobjekten erforderlich machen. So werden Kreuzungen mittels optoelektronischer Systeme (z.B. Kameras, die im sichtbaren oder im thermalen infraroten Spektralbereich messen) überwacht. Mit Bildverarbeitungsmethoden werden Objektinformationen (Ort, Typ, Größe, etc.) abgeleitet. Diese Bildinformation wird an den Kreuzungsrechner weitergeleitet und in einer Verkehrszentrale verarbeitet und visualisiert.
Um adäquate Entscheidungen treffen zu können, muss die Visualisierung das Umfeld weitestgehend originalgetreu wiedergeben können. Die Verkehrsobjekte werden geokodiert in ein solches Umfeld eingesetzt.
Für die Erstellung einer „realistischen virtuellen Umgebung” sind Oberflächenmodelle und die Texturierung dieser 3D-Objekte notwendig. Die Messung dieser Informationen kann terrestrisch und von Flugzeugplattformen erfolgen. Zum Teil existieren diese Daten, andere müssen neu erhoben werden. Das entsprechende Sensorpaket besteht aus einer hochauflösenden Kamera (z.B. die Panoramakamera), ein Laserscanner und ein Inertialnavigationssystem.
Mehrere Experimente mit einem solchen Sensorpaket wurden im Jahre 2004 durchgeführt. Weitere Untersuchungen befassen sich insbesondere mit der Automatisierung des Auswerteprozesses und der Genauigkeit der Koregistrierung und der Messungen.
|

|
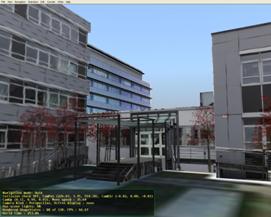
| Abbildung: Ausschnitte aus dem 3D-Modell des DLR in Berlin-Adlershof | |


© 2026 - Computer Vision, Institut für Informatik, HU Berlin - - Impressum