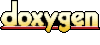
#include "internls\evrythng.h"#include "winresrc\rc_def.h"#include "help\help_def.h"#include "motrstrg\motrstrg.h"#include "motrstrg\m_layer.h"#include "motrstrg\m_motcom.h"#include "motrstrg\m_mothw.h"#include "motrstrg\C_8x2.h"#include "hardware\hwio.h"Include-Abhängigkeitsdiagramm für MOTORS.CPP:
Makrodefinitionen | |
| #define | DirectAccess |
| #define | R_TimeOut 214 |
| #define | R_UnknownCmd 215 |
Funktionen | |
| void _MOTORCLASS WINAPI | msSetSimulationType (TSimulationType t) |
| void _MOTORCLASS WINAPI | msRegister_C812ISA_Get (T812ISA_GET_CALLBACK cb) |
| void _MOTORCLASS WINAPI | msRegister_C812ISA_Put (T812ISA_PUT_CALLBACK cb) |
| void _MOTORCLASS WINAPI | msRegister_C832_Get (T832_GET_CALLBACK cb) |
| void _MOTORCLASS WINAPI | msRegister_C832_Put (T832_PUT_CALLBACK cb) |
Variablen | |
| DeviceList | MotorDrivers |
| ControllerList | MotorControllers |
| char | szMsgFailure [] = "Failure" |
| char | szMessage [] = "Message" |
| char | szMsgLine001 [] = "Initializing of drive module %s" |
| char | szMsgLine002 [] = "Problems with drive module startup !\n\nAbbort ?" |
| char | szMsgLine003 [] = "Starting up the drive module" |
| char | szMsgLine004 [] = "Save settings of %s " |
| char | szMsgLine005 [] = "This operation shouldn't be used for this drive !" |
| char | szMsgLine006 [] = "No valid drive !" |
| char | szMsgLine007 [] = "Calibration isn't done !" |
| char | szMsgLine008 [] = "Absolute zero for drive %s" |
| char | szMsgLine009 [] = "Calibration ready !" |
| char | szMsgLine010 [] = "\n\nThe new calibration data was saved !" |
| char | szMsgLine011 [] = "Optimize %s DCM-Parameter for %s" |
| char | szMsgLine012 [] = "Can't initialize the drive %s!" |
| LPMList | lpMList |
| HINSTANCE | hModuleInstance |
| neu: klier Allgemeine Einstellungen | |
| int | nC812 = -1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
neu: klier Allgemeine Einstellungen
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 1.3.7
1.3.7