|
Einer der wichtigsten Schritte beim Rendervorgang ist zweifellos die
Umwandlung der 3D-View Koordinaten in 2D-Bildschirmkoordinaten.
Da die Koordinaten zu diesem Zeitpunkt schon relativ zur Kamera berechnet
wurden, kann man davon ausgehen, dass die Kamera in ihrem eigenen System
im Ursprung liegt und nicht gedreht ist. Das vereinfacht die Rechnung enorm,
weshalb die sogenannte Projektionsmatrix eine der einfachsten ist,
wie ich finde.
Was für Informationen sollten in so einer Matrix stecken?
Na zunächst könnte uns erstmal interessieren, welche Art von Projektion
wir überhaupt wollen. In diesem Zusammenhang fallen mir mindestens zwei
verschiedene Arten ein und zwar perspektivische und orthogonale Projektion.
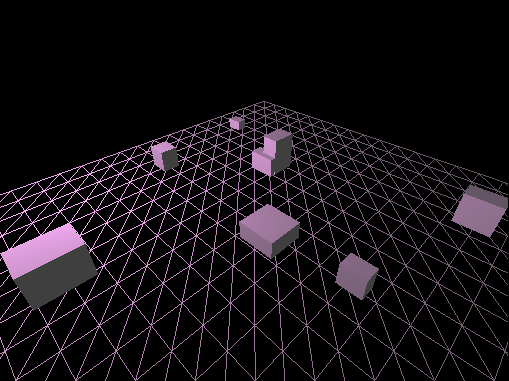
Perspektivische Projektion hat als markantes Merkmal, dass die Objekte mit
zunehmender Entfernung kleiner werden, wie man es auch aus dem täglichen
Leben kennt.
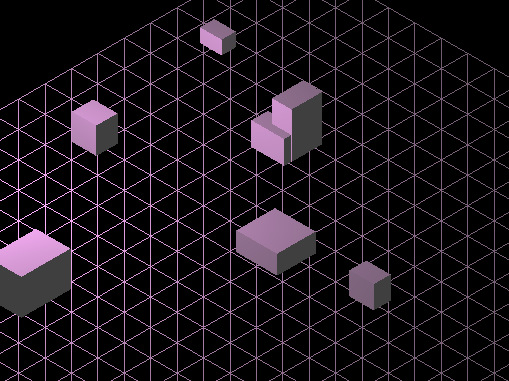
Bei orthogonaler Projektion ist das nicht der Fall. Hier bleiben die Objekte
und Winkel genau gleich groß. Solche Projektionen werden häufig bei
Ingenieursskizzen oder Isometrieengines eingesetzt (Diablo 1 & 2 verwenden
das z.B.).
Damit ist der Grundgedanke der Projektionsmatrix auch schon erfasst, alles, was man
sonst noch so festlegen kann, ist "Luxus".
Es lassen sich zusätzlich auch noch Sachen festlegen, wie Blickwinkel,
linke, rechte, vordere und hintere Clipping Ebenen,
aber eine 3D-Engine könnte auch ohne diese Sachen laufen, wenn auch nicht so
schnell wie mit.
Der Vorteil von Clipping Ebenen ist, dass alles, was außerhalb des aufgespannten
Raumes liegt, von vorne herein direkt ignoriert werden kann, was die Applikation
natürlich schneller macht.
Trotzdem beinhalten Abbildung 3 und 4 nur die Rohvarianten der Projektionsmodelle, weil
diese schon den Kerngedanken vermitteln.
Die Idee bei orthogonaler Projektion ist es, dass das Sichtvolumen ein Quader ist (Abb.5).
Auf diese Art und Weise ändert sich die Größe der Objekte, die weiter
weg sind nicht, was darin resultiert, dass man bei der entsprechenden Matrix die
Z-Koordinaten einfach ignoriert.
Bei der perspektivischen Projektion hingegen, fließt die Z-Koordinate in die
Berechnung von X- und Y-Koordinaten mit ein (es wird durch sie dividiert).
Diese Berechnungsmethode folgt übrigens direkt aus dem Strahlensatz.
In DBP kann man die aktuelle (perspektivische) Projektionsmatrix mittels des Befehls
projection matrix4 Matrixnummer
in die angegebene Matrix kopieren und erhält damit ein sehr mächtiges Werkzeug,
um eigenständig 2D mit 3D zu kombinieren.
Wenn man also einen Vektor damit transformiert und dieser relativ zur Kamera angegeben wurde,
erhält man einen neuen Vektor, der die Position auf dem Bildschirm angibt
(analog zum Rendervorgang oben).
|
|