|
Inhaltsverzeichnis
1 Eigenschaften von Fingerabdrücken
1.1 Merkmalseigenschaften
1.2 Unterscheidungsmerkmale
1.3 Entstehung
2 Anwendungen von Fingerabdrucksystemen
2.1 Verbreitung und Gewichtung der Fehlerraten
3 Sensoren und Technologien
3.1 Verbreitete Technologien
3.2 Beispiel optischer Sensor
3.3 Bildgenerierung
4 Merkmalsextraktion
4.1 Erzeugung eines Orientierungsbildes
4.2 Erzeugung eines Frequenzbildes
4.3 Segmentierung des Bildes
4.4 Bestimmung von Kern und Singularitäten
4.5 Filterung von Störgeräuschen
4.6 Bestimmung von Minutien
5 Matching
5.1 Allgemeine Verfahren
5.2 Problemfaktoren für das Matching
5.3 Allgemeine Funktionsweise minutienbasierter Verfahren
5.4 Das Hough-Verfahren
5.5 Vor- und Nachteile des Hough-Verfahrens
6 Performancevergleich
6.1 Fingerprint Verification Competition
Betrachten wir zunächst die Eigenschaften von Fingerabdrücken bezüglich ihrer Verwendung für biometrische Systeme. Gründe, die für die Verwendung von Fingerabdrücken sprechen, sind wie folgt [1]:
Zu den Nachteilen bei der Verwendung von Fingerabdrücken zur biometrischen Erkennung zählen wie folgt [1]:
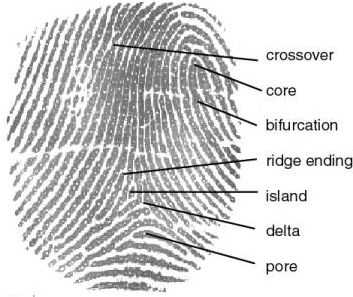
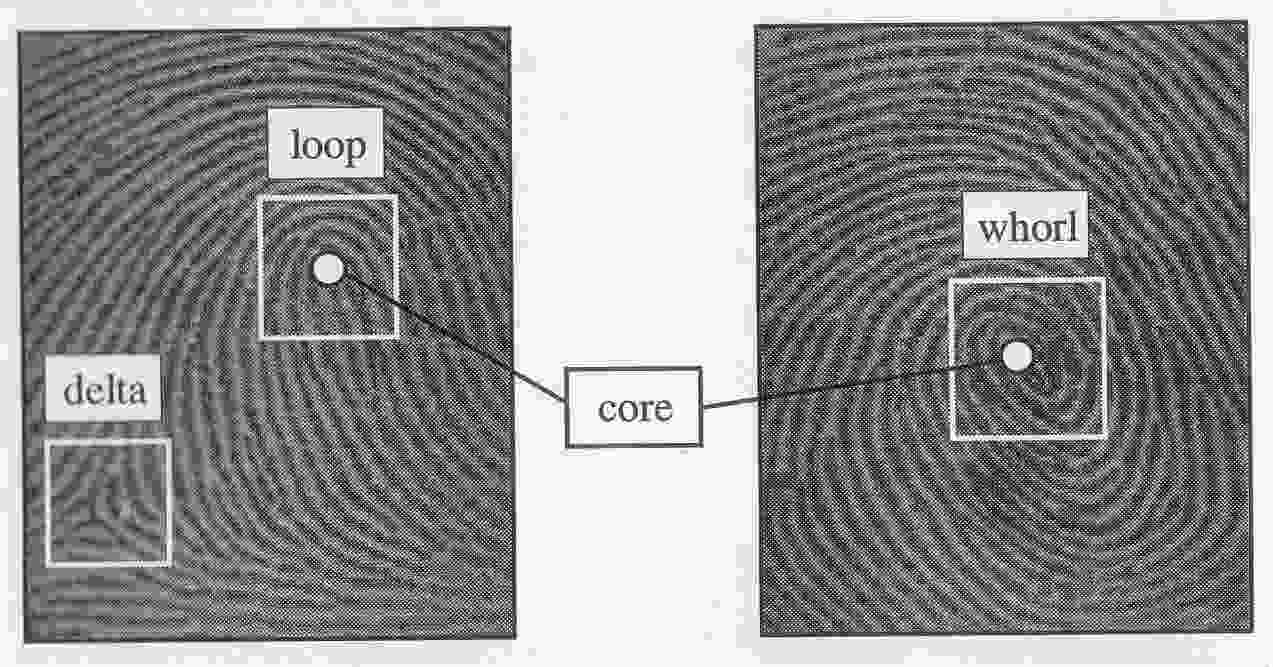
Um verschiedene Fingerabdrücke voneinander zu unterscheiden, betrachtet man die Grate, die auf der Oberfläche eines Fingerabdruckes zu erkennen sind. Die Beschaffenheit, Anordnung und Orientierung dieser Grate stellen die Unterscheidungsmerkmale von Fingerabdrücken dar, die jeden individuellen Fingerabdruck eindeutig charakterisieren. Die Unterscheidungsmerkmale lassen sich in drei Typen einteilen:
|
Fingerabdrücke entstehen während der ersten sieben Monate der Embryonalzeit. Während dieser Zeit werden die Hautzellen der Finger differenziert, das heißt, aus generischen Körperzellen entwickeln sich die Hautzellen mit spezifischen Funktionen. Durch die Bewegung des Embryos im Körper der Mutter tritt das Fruchtwasser auf zufällige Weise mit den differenzierenden Zellen in Kontakt und beeinflusst so während dessen Strukturbildung deren Beschaffenheit auf mikroskopischer und makroskopischer Ebene. Fingerabdrücke sind also nicht genetisch bedingt, was die Unterscheidung bei eineiigen Zwillingen erklärt. Jedoch ist die Eindeutigkeit der Fingerabdrücke einzig durch empirische Studien belegt. Es gibt keinen wissenschaftlichen Beweis für die Unterscheidbarkeit von Fingerabdrücken.
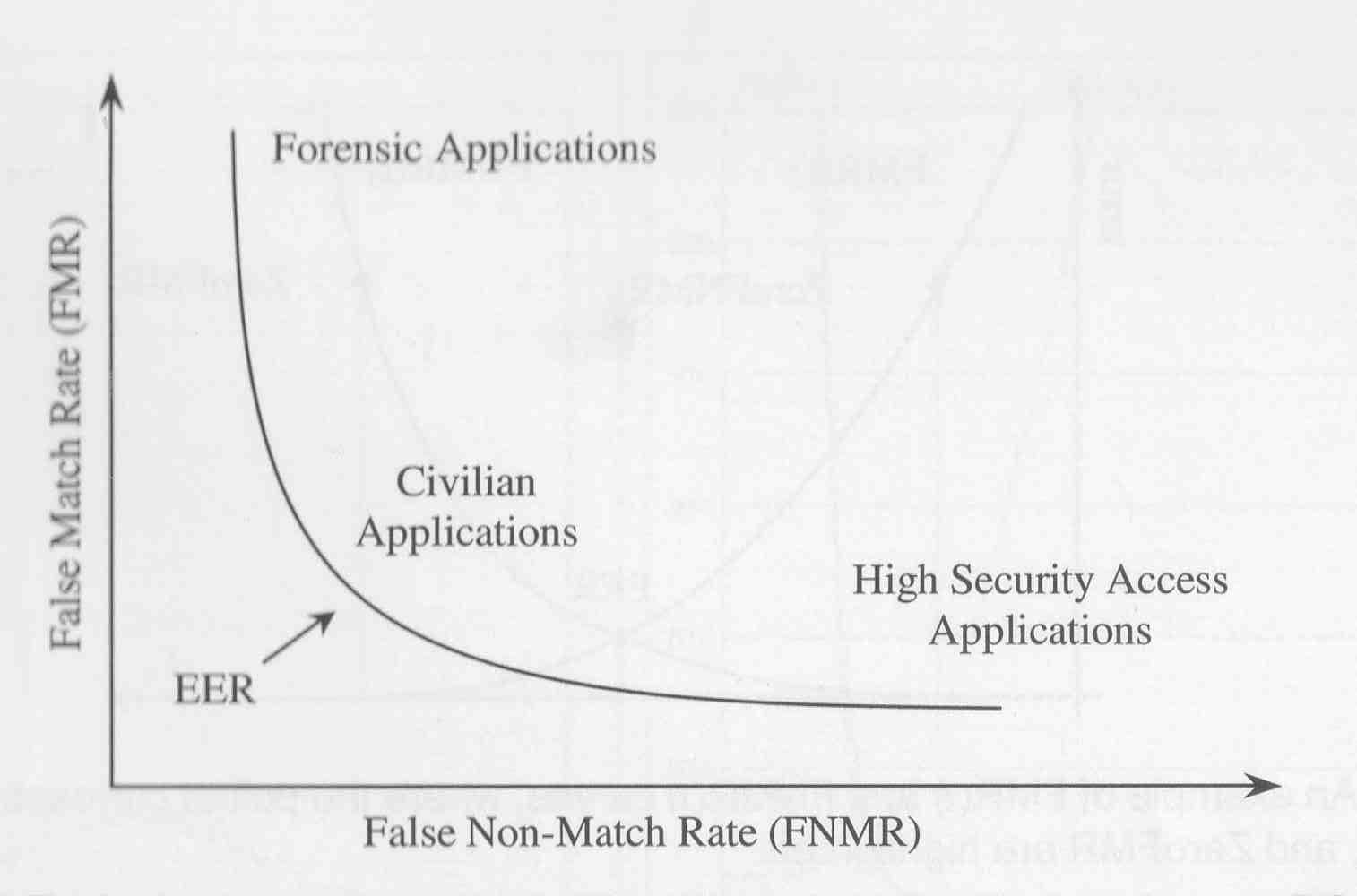
Fingerabdrucksysteme stellen die meistverbreiteten biometrischen Systeme dar. Entsprechend groß ist der Marktanteil von 52,1% unter den biometrischen Systemen, wobei forensische Institutionen nicht inbegriffen sind [1]. Dies lässt sich hauptsächlich auf die geringen Kosten von Fingerabdrucksystemen sowie den hohen Entwicklungsstand im Vergleich zu anderen biometrischen Systemen zurückführen. Fingerabdrucksysteme lassen sich in drei Hauptanwendungsgebiete unterteilen: Forensische oder Regierungsinstitutionen, zivile Einrichtungen und Hochsicherheitsbereiche.
Zur Anwendung mit dem Zweck der Verbrechensbekämpfung zählt die Aufnahme latenter Fingerabdrücke an Orten des Verbrechens mit dem Ziel des elektronischen Vergleichs mit Fingerabdrücken einer Datenbank. Hierbei handelt es sich um eine 1:N-Identifikation mit dem Ziel, die False Non-Match Rate (FNMR) möglichst gering zu halten. Eine hohe FMR kann hierbei eher vernachlässigt werden. Unter der Anwendung einer Regierungsinstitution versteht man beispielsweise die Verifikation der Identität von Krankenversicherten, Wahlberechtigten, etc. Hierbei ist eine niedrige FMR von entscheidender Bedeutung.
Die Nutzung durch private Unternehmen, beispielsweise zur Identifikation bei physischem oder logischem Zugang ihrer Mitarbeiter. Dies kann die Sicherheit sowie den Nutzerkomfort im Vergleich zu nicht-biometrischen Methoden verbessern, wenn ein geeigneter Kompromiss aus FMR und FNMR gefunden wird.
Hier soll einem eingeschränkten Nutzerkreis durch Identifikation oder Verifikation ein physischer oder logischer Zugang zu einem sicherheitsrelevanten Bereich gewährt werden, während der Zugang nicht-authorisierten Personen verweigert wird. Von entscheidender Bedeutung ist für solche Systeme eine möglichst geringe FMR.
|
Heutzutage gibt es eine Vielfalt von Fingerabdrucksensoren. Diese lassen sich in die Bereiche optische Sensoren, Siliziumsensoren und Ultraschallwellensensoren gliedern. Bei den optischen Sensoren wird der Fingerabdruck durch eine Kamera bzw. einen Scanner abgetastet. Der Finger wird im Allgemeinen auf eine ebene, transparente Schicht, wie beispielsweise Glasprisma oder Fiberglas, gelegt. Das vom Finger ausgehende Licht wird durch diese Schicht zu einem CMOS oder CCD geleitet, von dem es aufgenommen wird. Der CMOS/CCD befindet sich im Sensor gut geschützt gegenüber äußeren Einwirkungen. Durch den direkten Kontakt des Fingers mit der transparenten Schicht verbleiben bei jedem Kontakt Spuren von Schweiß, Dreck etc. Deshalb ist eine regelmäßige Säuberung der Schicht unabdingbar, da sonst der Sensor Fingerbilder von schlechter Qualität erzeugt, was die Fehlerraten erheblich erhöht. Ein weiterer Nachteil dieser Technologie ist die Umgehbarkeit, z.B. durch einen Plastikfinger. Es sind jedoch Bilder in hohen Auflösungen (bis 500 dpi) möglich.
Bei den Siliziumsensoren werden physikalische Größen wie z.B. Kapazität, Wärme oder elektrische Feldstärke gemessen. Der Finger wird direkt auf eine sehr dünne Schutzschicht gelegt und dann wird die physikalische Größe gemessen. Dabei besteht jeder Sensor aus einem zweidimensionalen Array von kleinen Sensoren. Jeder Sensor entspricht im erzeugten Fingerbild einem Pixel. Der Vorteil dieser Sensoren ist, dass sie sehr klein und billig sind. Ein Nachteil ist die dünne Schutzschicht zwischen Finger und Sensorschicht. Das Gerät reagiert empfindlich auf äußere Einwirkungen. Bei kapazitiven Sensoren reicht schon eine elektrostatische Entladung des Fingers auf dem Sensor aus, um diesen funktionsuntüchtig zu machen. Um die Sensoren robuster zu machen, müsste man die Schutzschicht dicker machen, was sich aber wiederum negativ auf die Erkennung der Grate und Täler des Fingers auswirken würde. Wie beim optischen Sensor ist der Finger im direkten Kontakt mit dem Sensor, deshalb muss der Sensor regelmäßig gesäubert werden.
Als dritten Bereich gibt es die relativ neuen Ultraschallwellensensoren. Hier wird mit Hilfe von Ultraschallwellen die Distanz zur Fingeroberfläche gemessen. Der Sensor schickt akustische Wellen aus, die vom Finger reflektiert werden, und fängt die Echos wieder ein. Hierbei steht der Finger nicht im Kontakt mit dem Sensor. Außerdem werden die Wellen nicht durch normalen Schmutz am Finger reflektiert, somit ist der Sensor relativ stabil gegenüber Unreinheiten. Weil diese Technologie in den Ursprüngen steckt, sind die Sensoren groß und teuer.
|
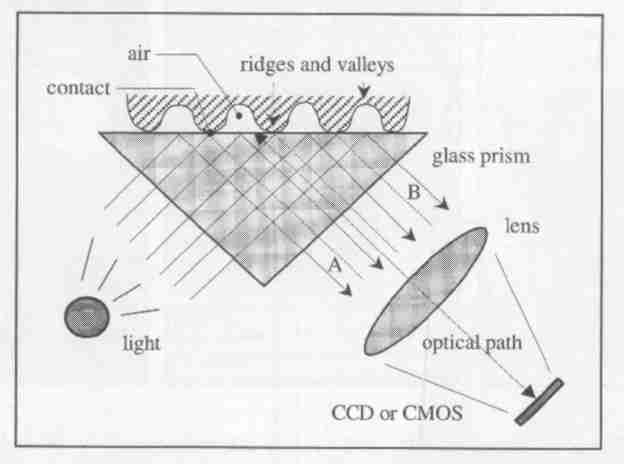
Ein Beispiel für einen optischen Sensor ist der Frustrated Total Internal Reflection (FTIR). Eine schematische Darstellung des Sensors ist in der Abbildung 4 gezeigt. Er besteht aus einer Lichtquelle, einem Glasprisma, einer Linse und einem CMOS oder CCD. Der Finger wird auf das Glasprisma gedrückt, dabei haben die Grate direkten Kontakt mit dem Prisma, nur zwischen den Tälern und dem Prisma ist noch Luft. Das Licht wird von einer Seite ins Prisma gesendet. Es wird dann an den Tälern reflektiert und an den Graten absorbiert bzw. zufällig gestreut. Die reflektierten Strahlen, die das Prisma auf der rechten Seite verlassen, werden außerhalb durch eine Linse auf ein CMOS oder CCD gebündelt, indem die Aufnahme stattfindet.
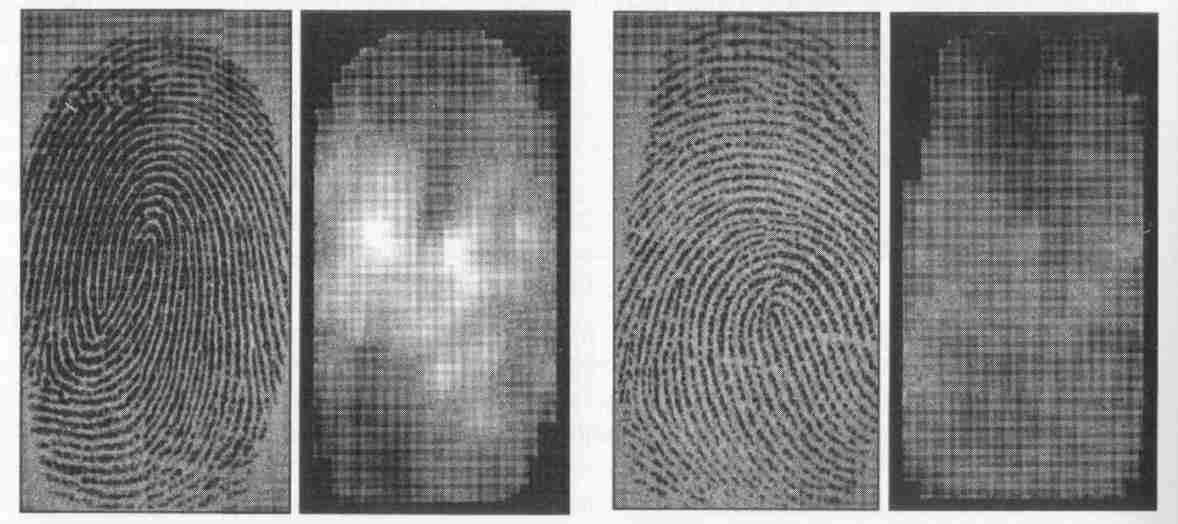
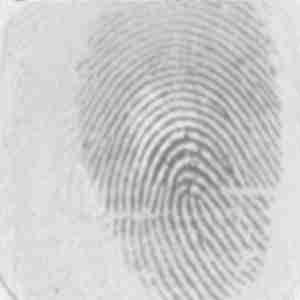
Bei jedem Sensor entsteht als Endprodukt im Allgemeinen ein Graustufenbild des Fingerabdruckes, wobei dunkle Linien Grate und helle Täler darstellen. In der Abbildung 5 werden zwei Graustufenbilder gezeigt, das linke ist von einem optischen und das rechte von einem Siliziumsensor aufgenommen. Beim rechten Fingerbild sieht man deutlich eine Verunreinigung durch einen latenten Fingerabdruck.

Um ein Graustufenbild zu generieren, gibt es zwei Modi. Beim live-scan Modus wird der Fingerabdruck durch einen Sensor aufgenommen. Beim offline Modus wird eine Aufnahme von hinterlassenen Fingerabdrücken, z.B. auf Gläsern, gemacht. Diese werden durch eine Kamera bzw. einen Scanner digitalisiert.
Etwa 80% der Fingerabdrucksysteme führen eine Merkmalsextraktion durch, um die Größe der abgelegten Daten gering zu halten. Es werden u.a. Singularitäten, Kern und Minutien extrahiert. Die Extraktion von Singularitäten und dem Kern wird zur Indexierung und Klassifizierung des Fingerbildes in Identifikationssystemen durchgeführt. Das Fingerbild wird dann nicht mehr mit jedem Template in der Datenbank verglichen, sondern nur noch mit gleichklassigen. Die Minutienextraktion wird zur Templategenerierung durchgeführt. Meistens wird der Typ, die Position im Bild, sowie ein ,,abgeschätzter'' Tangentenwinkel der Minutie angegeben; in der Abbildung 6 ist ein Beispiel gegeben. In diesem Abschnitt gehen wir davon aus, dass das Fingerbild als Graustufenbild vorliegt.
|
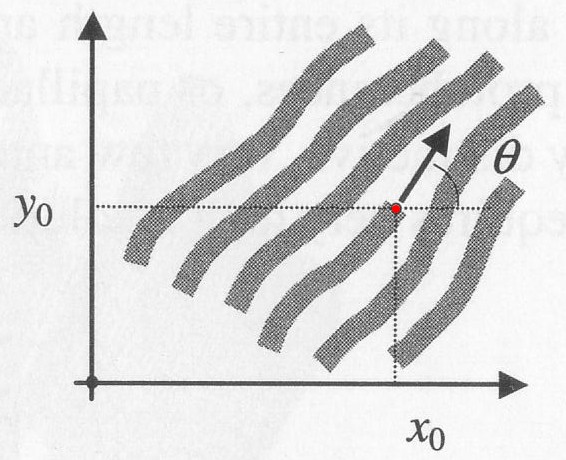
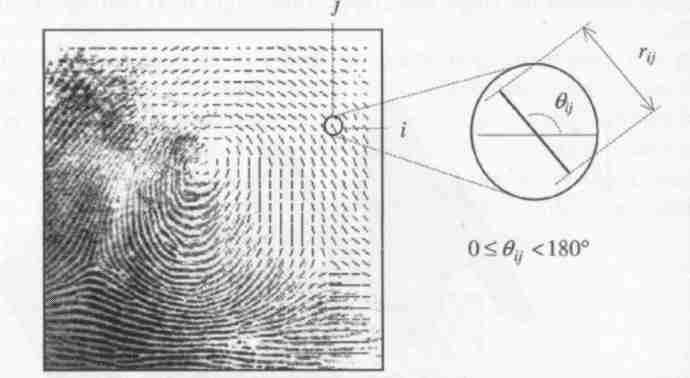
Die Erzeugung eines Orientierungsbildes des Fingers stellt die Grundlage für die meisten weiteren Extraktionsschritte dar. Als erstes wird das Fingerbild in gleichmäßige Blöcke aufgeteilt, dabei können die Blöcke auch aus einem Pixel bestehen. Für jeden dieser Blöcke wird eine lokale Orientierung eines Grats berechnet. Dabei ist die lokale Orientierung der Winkel zwischen der Grattangente und der horizontalen x-Achse des Fingerbildes. Aufgrund von Rauschen im Bild wird zu jedem Block ein Zuverlässigkeitswert berechnet. Dieser gibt an, wie vertrauenswürdig die berechnete lokale Orientierung des Blockes ist. Man nutzt die ,,Glattheit'' des Fingers aus, das heißt, in benachbarten Blöcken verändert sich die lokale Orientierung minimal. Man kann deswegen sagen, dass der Zuverlässigkeitswert das Maß der Übereinstimmung zur benachbarten Orientierung ist. In der Abbildung 7 ist dies noch mal verdeutlicht.
|
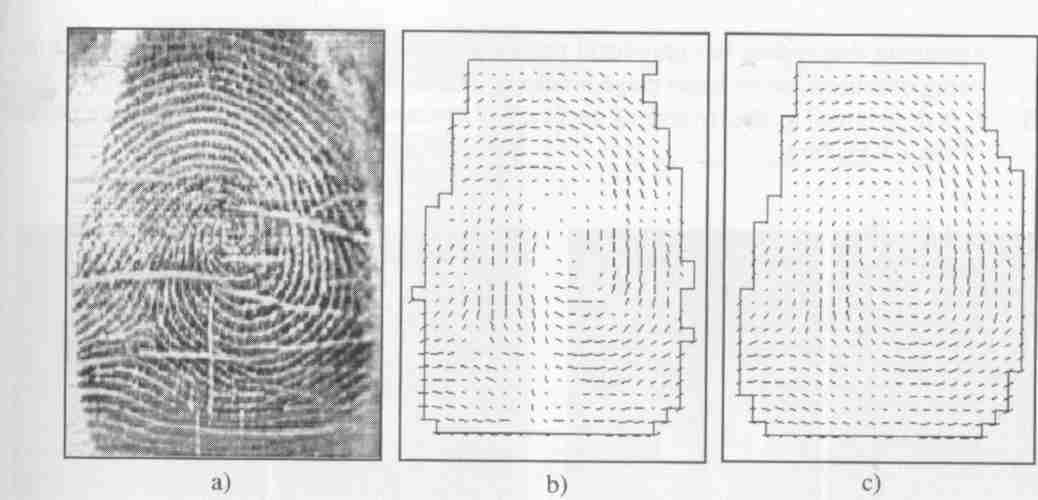
Die Zusammenfassung der Orientierung aller Blöcke ergibt das Orientierungsbild. Auf diesem wird zum Schluss ein Regularisierungsschritt durchgeführt, um die Unregelmäßigkeiten der Orientierungen, die durch das Rauschen bedingt sind, herauszufiltern und zu mindern. In der Abbildung 8 ist ein Beispiel gegeben.
|
Ein Verfahren zur Abschätzung der lokalen Orientierung ist das von Stock und Swonger [1]. Bei diesem Verfahren wird nur eine feste Anzahl von lokalen Orientierungen betrachtet, siehe Abbildung 9. Für jeden Punkt im Bild wird berechnet, welche Orientierung die geringste Graustufenfluktuation, das heißt, die geringste Grauwertänderung entlang der Orientierung hat. Hierbei nutzt man aus, dass die erwartete Fluktuation entlang der Tangente am geringsten und orthogonal zur Tangente am höchsten ist.
|
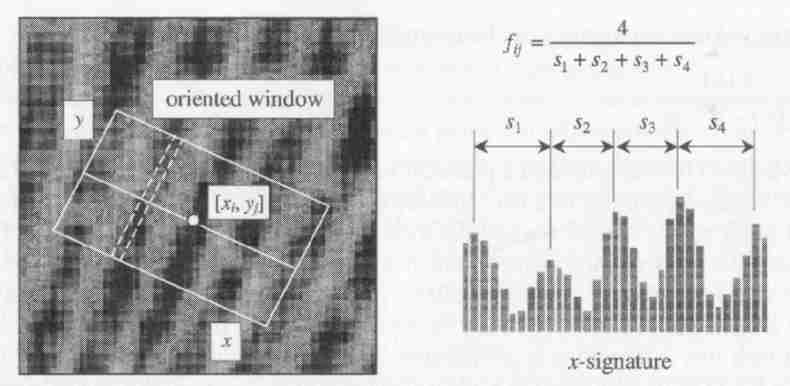
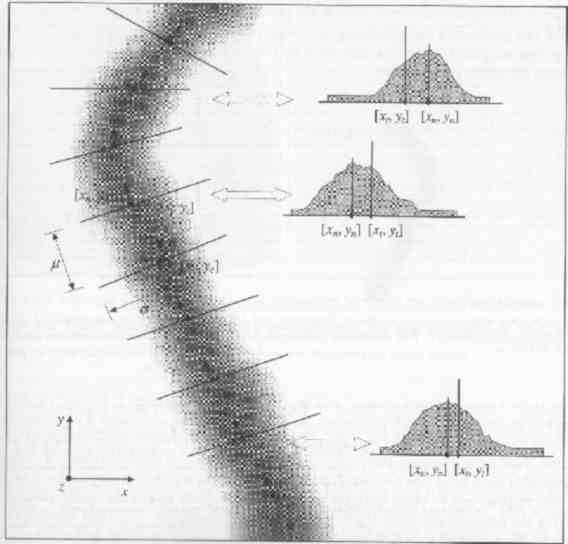
Bei der Erzeugung des Frequenzbildes wird die lokale Gratfrequenz/-dichte abgeschätzt. Grundlage für das Frequenzbild ist das Orientierungsbild. Für jeden Block wird ein orientiertes Rechteck genommen, das orthogonal zur lokalen Orientierung und dessen Mittelpunkt im Block zentriert ist. Danach wird die Anzahl der schneidenden Grate gezählt, wobei ein Grat als eine Graustufenspitze im Bild angenommen wird. Siehe dazu Abbildung 10.
|
Die lokalen Frequenzen stellen ein mittleres Unterscheidungsmerkmal von Fingerabdrücken dar. Sie unterscheiden sich nicht nur zwischen einzelnen Fingern, sondern auch in verschiedenen Regionen eines Fingers. In der Abbildung 11 sind diese beiden Fälle dargestellt. Am meisten wird das Frequenzbild für das Filtern von Rauschen eingesetzt.
|
Unter der Segmentierung des Bildes versteht man die Hervorhebung des Fingerabdruckes vom Hintergrund. Eine Möglichkeit, den Fingerabdruck vom Hintergrund hervorzuheben, ist das Orientierungsbild. Dabei geht man von der ,,Unorientiertheit'' des Hintergrundes aus, wohingegen der Fingerabdruck selbst stark orientiert ist. Ein Beispiel dafür ist in der Abbildung 8 dargestellt.
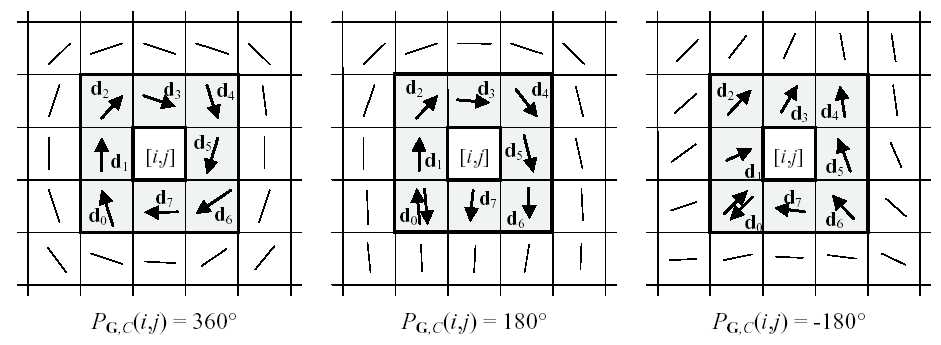
Wie schon erwähnt wurde, werden die Singularitäten und der Kern zur Indexierung und Klassifizierung des Fingerbildes benutzt. Es gibt Fingertypen, die keine Singularitäten aufweisen. Ein Verfahren für die Bestimmung von Singularitäten ist die Poincaré Methode [1]. Als Grundlage für diese Methode dient das Orientierungsbild. Für einen Block [i, j] (i-te Spalte, j-te Zeile) des Orientierungsbildes ist der Poincaré Index
|
|
In der Abbildung 13 sind drei Bilder zu sehen. Links ist das Bild des Fingerabdruckes und rechts sind die beiden zugehörigen Orientierungsbilder mit den berechneten Singularitäten, wobei beim linken kein Regularisierungsschritt stattgefunden hat. Man kann erkennen, dass im linken Orientierungsbild einige falsche Singularitäten erkannt wurden, im rechten nicht.

Bei der Filterung von Störgeräuschen sollen die negativen Auswirkungen von Sensorrauschen, kleine Unterbrechungen der Grate, nicht wohl separierten parallelen Graten, Schnitten und Ähnlichem behoben oder zumindest gemindert werden. Die Idee der meisten Filter ist es, zuerst den Fingerabdruck in Blöcke aufzuteilen und für jeden Block dessen Qualität zu bestimmen. Danach werden die Blöcke anhand ihrer Qualität gefiltert, das heißt, bei Blöcken schlechter Qualität wird ein anderer Filter eingesetzt als bei Blöcken besserer Qualität.
Bei der Bestimmung von Minutien unterscheidet man zwei Arten: eine bestimmt diese aus dem Graustufenbild und die andere aus einem erzeugten Binärbild. Bei der Bestimmung aus dem Graustufenbild werden mathematische Verfahren eingesetzt, die über die Grate iterieren und diese ,,Wanderung'' in einem parallelen Bild aufzeichnen. Dabei kann man sich das Graustufenbild als eine dreidimensionale Funktion vorstellen, in der die Graustufen die Höhen sind. Man beginnt mit einem Punkt auf dem Grat. Von diesen Punkt aus geht man zu einem Zwischenpunkt in eine Richtung der lokalen Orientierung. Von diesem Zwischenpunkt aus betrachtet man eine Strecke, die orthogonal zur Orientierung ist. Auf dieser Strecke sucht man dann den höchstgelegenen Punkt, dieser ist unser neuer Punkt. Die Schritte werden solange wiederholt, bis der Grat endet oder in einen anderen Grat mündet, an dem wir schon entlang gekommen sind (Abbildung 14).
|
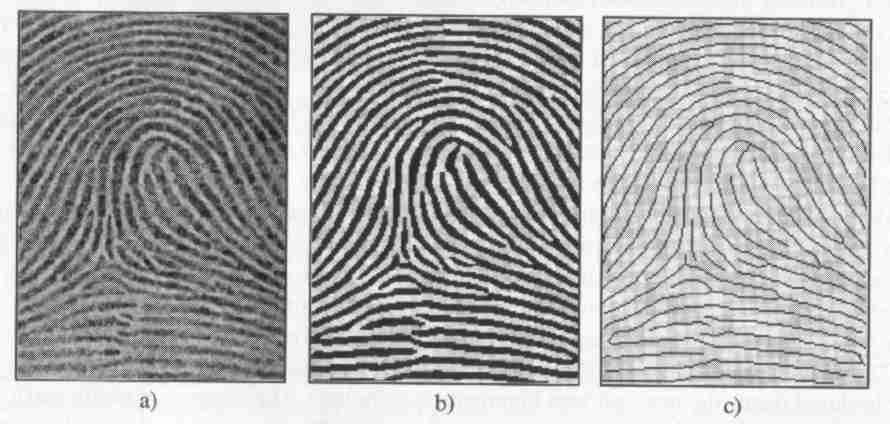
Bei der Bestimmung der Minutien im normierten Binärbild muss als erstes das Graustufenbild in ein Binärbild umgewandelt werden. Dies erfolgt in zwei Schritten, ein Beispiel ist in der Abbildung 15 gegeben.
|
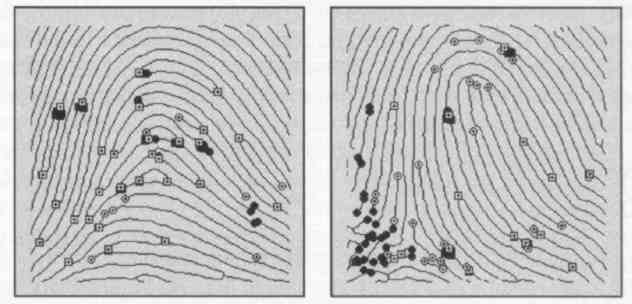
Beim ersten Schritt wird das Bild in ein Schwarzweißbild transformiert. Ein einfaches Verfahren ist die Umwandlung der Pixel nach einem Schwellgrauwert in schwarz oder weiß, je nachdem ob der vorherige Farbwert über oder unter dem Schwellwert lag. Das Resultat ist ein Binärbild. In diesem Binärbild wird die Dicke der Grate auf die Breite eines Pixels normiert. Dabei entstehen viele Artefakte, die zunächst herausgefiltert werden müssen, wobei niemals alle Artefakte entfernt werden können. Im entstehenden gefilterten Bild werden dann die Minutien bestimmt. Durch die verbleibenden Artefakte können hierbei falsche Minutien identifiziert werden. Deshalb wird zuletzt noch eine Filterung der falschen Minutien durchgeführt. In der Abbildung 16 sind zwei normierte Binärbilder mit den korrekt und fälschlich identifizierten Minutien zu sehen.
|
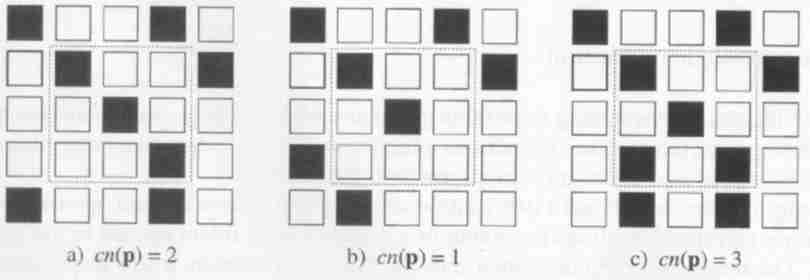
Die Minutien kann man u.a. mit Hilfe der ,,crossing number'' cn(p) eines Pixel p bestimmen:
|
|
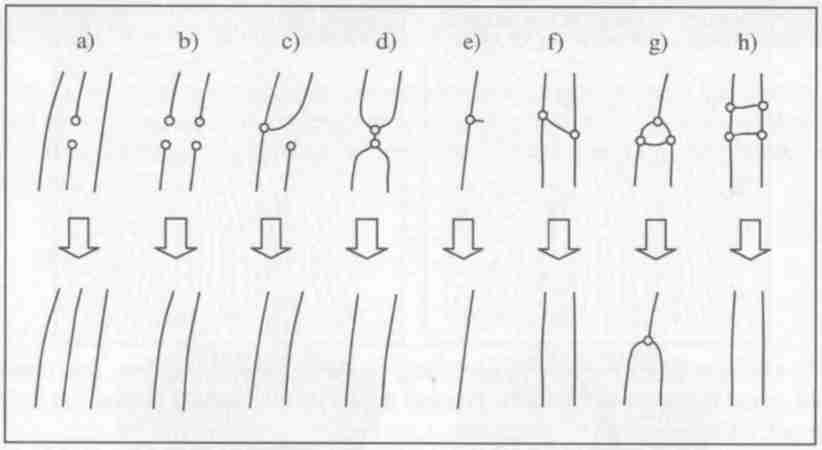
Bei der Filterung falscher Minutien versucht man, falsche Minutienstrukturen zu erkennen und zu entfernen. Dabei macht man sich die Glattheit des Fingers zum Nutzen. Durch diese existiert nur eine begrenzte Anzahl von Minutienstrukturen. In der Abbildung 18 sind die häufigsten falschen Minutienstrukturen und ihre korrigierte Struktur zu sehen.
|
Für das Matching, das heißt der Vergleich eines Inputfingerabdruckes mit einem Templatefingerabdruck, sind drei allgemeine Verfahren am weitesten verbreitet:
Bei der Aufnahme des Fingerabdruckes am Sensor kommt es zwangsläufig zu mehr oder weniger großen Variationen bezüglich der Position und der Rotation des Fingers. Denn es ist praktisch unmöglich, den Finger mehrere Male exakt an der gleichen Stelle auf den Sensor zu halten. Bei größeren Verschiebungen kann es auch zu unterschiedlichen Erfassungsbereichen des Fingers kommen, insbesondere dann, wenn der Sensor aufgrund seiner Größe einen kleinen Erfassungsbereich hat.
Durch den variablen Druck, mit dem der Finger auf den Sensor gehalten wird, kommt es außerdem zu nichtlinearen Verzerrungen des Fingerabdruckes. Das bedeutet, dass der Fingerabdruck z.B. in einer gebogenen oder gezerrten Form aufgenommen wird. Durch mikroskopische Verunreinigungen des Fingers kann das Bild, das vom Fingerabdruck aufgenommen wird, verrauscht sein.
Des Weiteren kann es bei der Merkmalsextraktion zu den angesprochenen Fehlern kommen, die eine fehlerhafte Repräsentation des Fingerabdruckes zur Folge haben. Da diese Fehler Zufällen unterliegen, können die Templates eines mehrmals aufgenommenen Fingerabdruckes unterschiedlich sein.
In jedem Fall ist es beim Enrollment unerlässlich, eine Qualitätsprüfung des aufgenommenen Fingerabdruckes durchzuführen. Auf diese Weise wird schon im Vorfeld eine Großzahl der genannten Problemfaktoren minimiert.
Template- und Inputfingerabdrücke lassen sich respektive darstellen als Vektoren
|
|
|
|
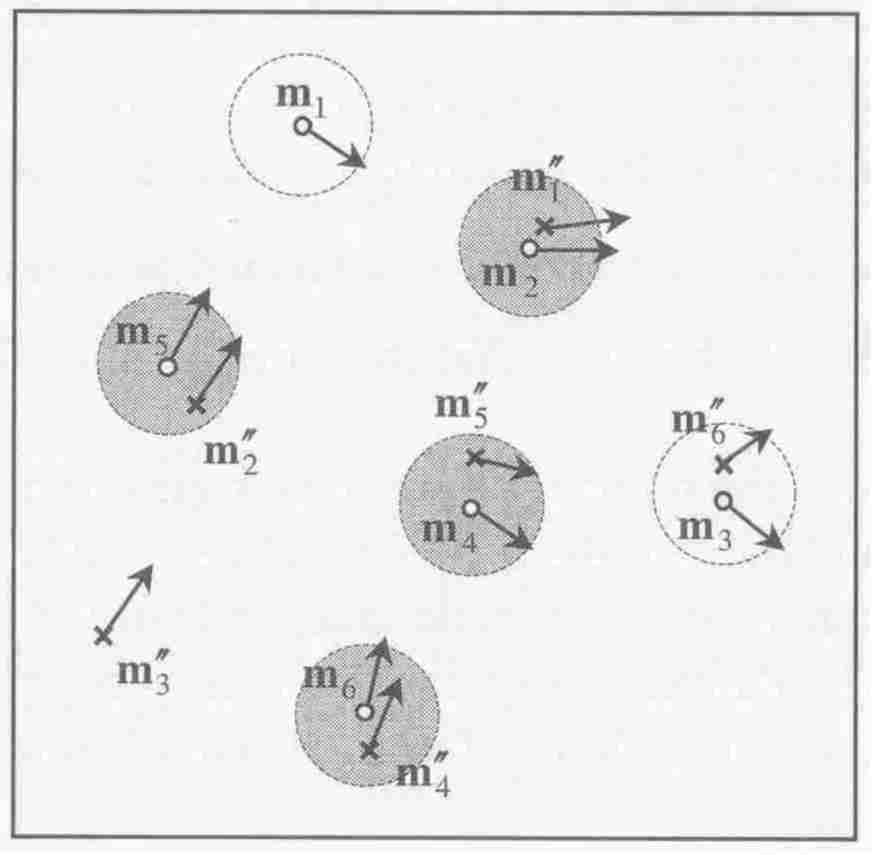
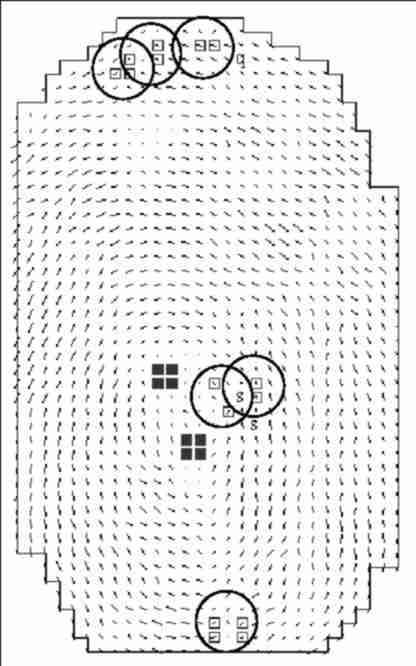
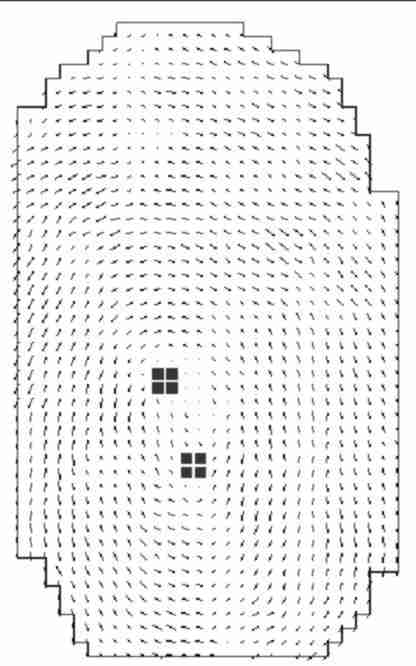
In Abbildung 19 sehen wir die Deckungen von Minutien eines Inputfingerabdruckes mit den Minutien eines Templatefingerabdruckes. Die Minutien des Inputs sind als x, die des Templates als o dargestellt. Die Kreise entsprechen der maximalen Entfernung, also dem Toleranzwert r0. Die Pfeile stellen die Ausrichtung der Minutien dar.
|
Matchende Minutien sind von grau ausgefüllten Kreisen umgeben. Hier liegen räumliche und Richtungsdifferenz unter den Toleranzwerten. Für alle übrigen Inputminutien gibt es keine matchende Templateminutie.
Um nun festzustellen, welche Anzahl Minutien eines Inputfingerabdruckes mit denen eines Templatefingerabdruckes matchen, müssen auf die Orts- und Richtungsparameter des Input verschiedene geometrische Transformationen angewendet werden, bis eine Transformation gefunden ist, die eine maximale Anzahl matchender Minutien erlaubt. Der Grund dafür sind die in Kapitel 5 beschriebenen Problemfaktoren. Die gefundene Transformation kompensiert am besten die Fehler des Inputfingerabdruckes.
Zu den wichtigsten geometrischen Transformationen zählen:
1996 wurde von Ratha et al. ein minutienbasiertes Matching-Verfahren vorgestellt, das Transformationen zur Deplatzierung der Koordinaten, Rotation der Ausrichtung, sowie der Skalierung beinhaltet.
Sei I={m1˘, m2˘, ..., mn˘}, mj˘={xj˘, yj˘, qj˘}, j=1, ... ,n die Vektordarstellung des Inputfingerabdruckes und T={m1,m2,... ,mm}, mi={xi, yi, qi}, i=1,...,m die Vektordarstellung des Templatefingerabdruckes.
Eine Transformation ist dann ein Quadrupel (Dx,Dy ,q, s), wobei die Parameter Dx und Dy die Verschiebungen entlang der x- bzw. y-Achse, q eine Rotation, und s eine Skalierung des Inputfingerabdruckes darstellen.
Dabei gehen wir von einer endlichen Anzahl Transformationen aus, die nach Kriterien der besten Fehlerkompensierung ausgewählt wurden. Die Transformation des Inputfingerabdruckes, die die meisten Minutien mit denen des Templatefingerabdruckes matchen lässt, wird durch folgenden Algorithmus bestimmt [1]:
Das Hough-Verfahren erlaubt eine sehr gute Kompensierung von Fehlern des Inputfingerabdruckes, die in der Regel unvermeidbar sind. Voraussetzung ist jedoch, dass geeignete Transformationen ausgewählt werden, die keine unnatürliche Veränderung des Fingerabdruckes erlauben. Andernfalls kann dies zu einer Erhöhung der FMR führen.
Eine effiziente Implementierung des Hough-Verfahrens von Ratha, Rover und Jain (1995) hat die Komplexität O(m·n·c·d), wobei c die Anzahl der Rotationen und d die Anzahl der Skalierungen sind. In Anbetracht der Notwendigkeit einer relativ hohen Anzahl Transformationen bedeutet dies eine hohe Komplexität, die den Algorithmus für den Identifikationsmodus mit einer großen Datenbank praktisch unbrauchbar macht.
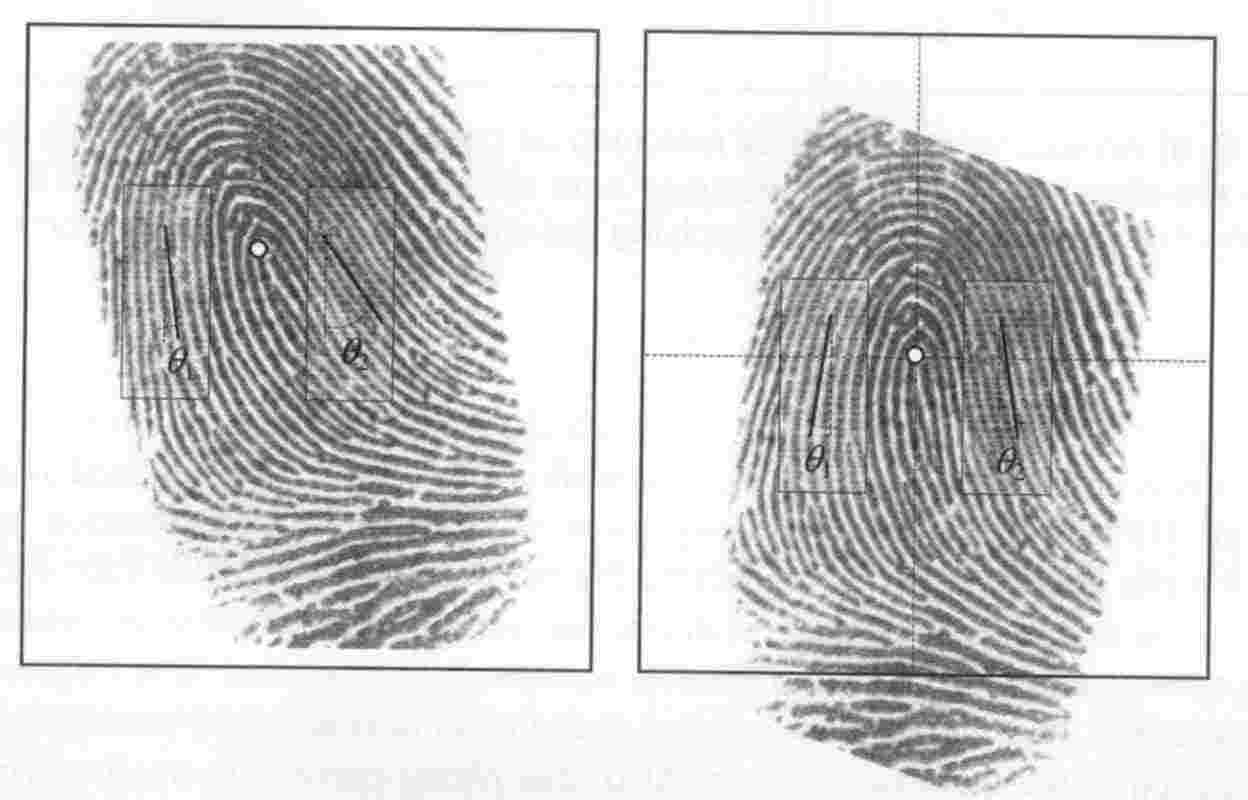
Ein Ansatz, der hohen Komplexität entgegen zu wirken, ist die absolute Vorverarbeitung (absolute pre-alignment). Hierbei werden auf den Templatefingerabdruck vor der Speicherung in der Datenbank Transformationen angewandt, die das Template bezüglich der Singularitäten und des Kerns anpassen. Die M82-Methode beispielsweise, die vom FBI verwendet wird, zentriert den Fingerabdruck anhand der Position des Kerns, und gleicht seine Orientierung anhand der Ausrichtung der links und rechts neben dem Kern liegenden Grate an. Dabei wird der Fingerabdruck rotiert, so dass die Winkel der beiden Grate zur y-Achse des Bildes identisch sind (siehe Abbildung 20).
|
Bei den vielen existierenden Matchingalgorithmen ist die Frage gegeben: ,,Welcher ist der beste?'' Leider ist die Frage nicht leicht zu beantworten, weil die Performance nicht nur aus einen Faktor besteht, sondern immer ein Tradeoff u.a. zwischen der Genauigkeit (z.B. FMR, FNMR), Effizienz (Enrollment-, Verifikationszeit), Skalierbarkeit zur 1:N Identifikation und Templategröße ist. Die Gewichtung dieser Faktoren bei einem Fingerabdrucksystem hängt von ihrem Einsatzgebiet ab. Z.B. ein System im Hochsicherheitsbereich sollte eine sehr kleine FMR haben, hingegen für forensicher Anwendungen oder zivile Einrichtungen eine niedrige FNMR. Ein weiteres Problem ist, dass die Systeme unterschiedliche Testdaten und -größen zur Trainierung ihres Algorithmus zur Verfügung haben. Da es keine Standardisierung des Eingabeformates zum Matchingalgorithmus gibt, sind diese auch unterschiedlich zwischen den Systemen. Das alles macht ein Performancevergleich zwischen Matchingalgorithmen schwierig.
Der Wettbewerb ,,Fingerprint Verification Competition'', kurz FVC, versucht diese Probleme zu beheben, um einen annähernd objektiven Vergleich zwischen den verschiedenen Matchingalgorithmen herzustellen. Dieser Wettbewerb findet alle zwei Jahre statt, wobei im Jahre 2000 der erste Wettbewerb abgelaufen ist. FVC wird von Biometric Systems Lab, kurz BioLab, (University of Bologna), National Biometric Test Center und Pattern Recognition and Image Processing Laboratory, kurz PRIP, (Michigan State University) durchgeführt.
Bei den bisherigen drei Wettbewerben (2000, 2002, 2004) wurden jeweils vier unterschiedliche, offene Datenbanken mit Fingerbildern unterschiedlicher Qualität eingesetzt. Die Fingerbilder wurden mit verschiedenen Sensoren oder synthetisch erzeugt. Alle Fingerbilder wurden als tif-Formate in den Datenbanken gespeichert. Jeder Teilnehmer hat die gleichen Trainingsdaten bekommen, jeder Matchingalgorithmus wurde mit den gleichen Fingerbildern getestet und als Schnittstellenformat zum Matchingalgorithmus wurde das tif-Format genommen.
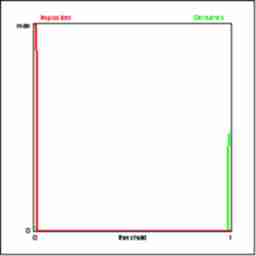
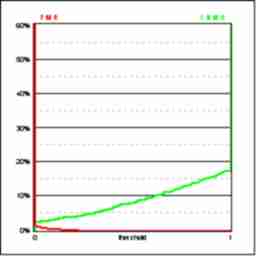
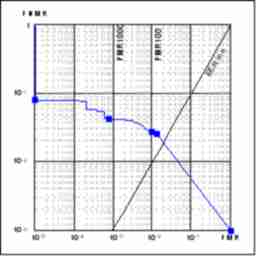
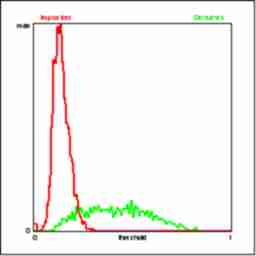
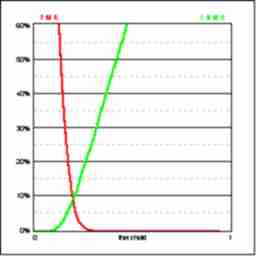
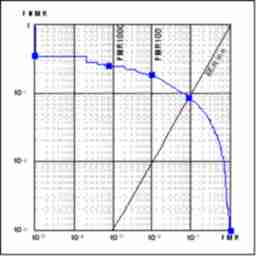
In den Abbildungen 21 und 22 sind die genuine und impostor Verteilung, die FMR(t) und FNMR(t) Kurve, sowie die Receiver Operating Characteristic, kurz ROC, Kurve von zwei Matchingalgorithmen P047 und P120 von FVC 2004 dargestellt. Dabei zeigen die Diagramme die empirischen Resultate der beiden Matchingalgorithmen für die erste Datenbank DB1 von FVC 2004. Die Fingerbilder in DB1 wurden mit einem optischen Sensor aufgenommen. Die genuine Verteilung, grüne Kurve, zeigt die absolute Anzahl der Abweisungen des Matchingalgorithmus von einem Fingerabdruckpaar des gleichen Fingers für die Schranke t. Die impostor Verteilung, rote Kurve, gibt die absolute Anzahl der Treffer für ein Fingerabdruckpaar von unterschiedlichen Fingern an. Die FMR(t), rote Kurve, und FNMR(t), grüne Kurve, geben die Fehlerraten an, die aus der genuinen und impostor Verteilung folgen. Die ROC Kurve ist eine Kurve von FMR gegen (1-FNMR) für verschiedene Schranken t, die Koordinatenachsen in den jeweiligen Diagrammen sind logarithmisch aufgeteilt.
Für die Datenbank DB1 hat der Algorithmus P047 die besten Ergebnisse mit einer Equal-Error Rate (EER) 1,97% erzielen können. Die EER ist die Fehlerrate bei der Schranke t, bei denen FMR(t) = FNMR(t) gilt. P120 hat bei dieser Datenbank einen Mittelplatz mit EER 8,94% belegt.
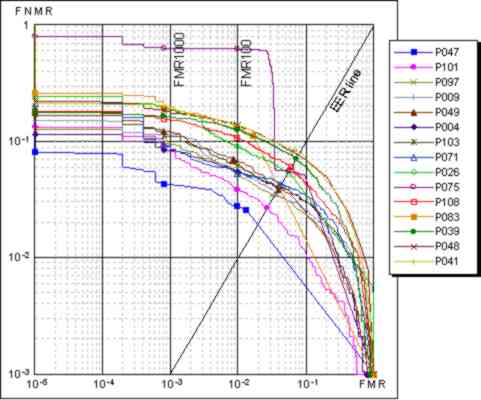
In der Abbildung 23 sind die ROC Kurven der 15 besten Matchingalgorithmen für die Datenbank DB1 abgebildet, weitere Statistiken sind im Internet unter http://bias.csr.unibo.it/fvc2004/ zu finden.
|