
Sommersemester 2009:
- Seminar
„Schwarmverhalten“
Schwarmverhalten ist ein Beispiel dafür, wie aus einfachen Regeln komplexes Verhalten entstehen kann. In diesem Seminar werden verschiedene Aspekte des Phänomens Schwarmverhalten besprochen und analysiert. Wir betrachten hierbei die Strategien von biologischen Vorbildern und deren Modellierung, Schwarmverhalten als emergentes Verhalten, und die sensomotorische Interaktion und Kommunikation zwischen Schwarmmitgliedern. Die Algorithmen können in einer Simulationsumgebung oder auf autonomen fliegenden Robotern (siehe PSE Quadrokopter) getestet werden.
Montags 11-13 Uhr, RUD 25, 4.113
- Projektseminar „Quadrokopter II“
Im Quadrokopter Projekt werden fliegende Roboter des Typs Mikrokopter gebaut, mit Sensorik ausgestattet und programmiert. Ziel des Projekts ist eine autonome Navigation der Mikrokopter mithilfe von biologisch inspirierten Navigationsstrategien sowie Schwarmverhalten.
Voraussetzungen: Besuch des Seminars "Schwarmverhalten" oder eine Nacharbeitung der dort behandelten Themen. Die erfolgreiche Teilnahme wird durch aktive Mitarbeit im Projektteam und eine Prüfung nachgewiesen.
4SWS
Montags 13-15 Uhr, Mittwochs 13-15 Uhr + weitere Termine
Wintersemester 2008/2009:
- Seminar „Grundlagen der Mensch-Roboter
Interaktion“
Mit wachsender Komplexität und Autonomie moderner Roboter wird eine natürliche Interaktion zwischen Robotern und Menschen immer wichtiger. In diesem Seminar werden Prinzipien dieser Interaktion anhand von aktuellen Publikationen besprochen. Die Themen sind unter anderem Soziale Interaktion, multimodale Interaktion, Joint Attention, Wahrnehmung und Sensorik.
Montags 11-13 Uhr, RUD 26, 1'307
- Projekthalbkurs „Quadrokopter I“
Im Quadrokopter Projekt werden fliegende Roboter des Typs Mikrokopter gebaut, mit Sensorik ausgestattet und programmiert. Ziel des Projekts ist eine autonome Navigation der Mikrokopter mithilfe von biologisch inspirierten Navigationsstrategien. Die Themen sind eng mit den Forschungsarbeiten des Lehrstuhls für Kognitive Robotik verbunden und können zu Studien- und Diplomarbeiten führen.
Voraussetzungen: Besuch des Seminars "Navigationsstrategien in der Robotik" im Sommersemester 2008 oder eine Nacharbeitung der dort behandelten wissenschaftlichen Artikel. Die erfolgreiche Teilnahme wird durch aktive Mitarbeit im Projektteam und eine Prüfung nachgewiesen.
Dienstags 11-15 Uhr, RUD 25, 4.121
- Modul
„Kognitive Robotik“ (mit Prof. Burkhard)
Autonome intelligente Roboter gehören zu den spannendsten Forschungsgebieten der Gegenwart: Sind dafür Vorbilder aus der Natur zu kopieren oder gibt es andere Möglichkeiten zur Modellierung und Implementierung künstlicher Systeme, die in der realen Welt agieren sollen? Die Themen beziehen aktuelle Arbeiten an den Lehrstühlen KI und KR ein, schlagen jedoch auch Brücken in andere Arbeitsgebiete und Disziplinen und umfassen u.a.: Softwarearchitekturen für kognitive Agenten, Umgebungswahrnehmung, Aktorik. Bei Interesse besteht die Möglichkeit zu Studien- und Diplomarbeiten sowie zur Mitarbeit in den Projekten. Der Halbkurs wird als Projekt-Halbkurs mit Vorlesung, Übung und Praktikum durchgeführt.Vorkenntnisse aus der KI sind empfehlenswert.
VL Mo + Mi 13-15 Uhr
UE
PR
Sommersemester 2008:
Seminar "Navigationsstrategien in der Robotik"
In diesem Seminar werden verschiedene Navigationsstrategien vorgestellt und ihre Realisierung in der Robotik besprochen. Die meisten dieser Strategien sind dabei biologisch inspiriert und basieren auf Verfahren, die durch die Evolution ideal auf unterschiedliche Umgebungen und Sensortypen angepasst wurden. Die Verfahren reichen von einfachem Spurfolgen bis zum Aufbau von komplexen kognitiven Karten.

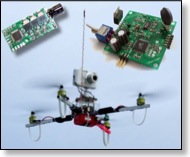
Das Seminar besteht aus einem Vortrags- und einem praktischen Teil. In diesem werden einige der vorgestellten Navigationsverfahren auf Robotern realisiert und in der Praxis getestet. Bei den Robotern handelt es sich um Quadrokopter, die im Praktikum gebaut und programmiert werden.
SE Di 13-15 wöch. RUD 26, 1’307 V. Hafner
PR BLOCK V. Hafner
Wintersemester 2007/2008:
Vorlesung "Kognitive Robotik"
Autonome intelligente Roboter gehören zu den spannendsten Forschungsgebieten der Gegenwart: Sind dafür Vorbilder aus der Natur zu kopieren oder gibt es andere Möglichkeiten zur Modellierung und Implementierung künstlicher Systeme, die in der realen Welt agieren sollen? Die Themen beziehen aktuelle Arbeiten am Lehrstuhl ein, schlagen jedoch auch Brücken in andere Arbeitsgebiete und Disziplinen und umfassen u.a.: Softwarearchitekturen für kognitive Agenten, Umgebungswahrnehmung, Aktorik. Bei Interesse besteht die Möglichkeit zu Studien- und Diplomarbeiten sowie zur Mitarbeit in den Projekten. Der Halbkurs wird als Projekt-Halbkurs mit Vorlesung, Übung und Praktikum durchgeführt. Vorkenntnisse aus der KI sind empfehlenswert.
VL Mo 13-15 wöch. RUD 26, 1’303 H.-D. Burkhard, V. Hafner
VL Mi 13-15 wöch. RUD 26, 1’303
UE Mo 15-17 wöch. RUD 26, 1’303
Sommersemester 2007:
Seminar "Sensomotorische Koordination und Interaktion"
In diesem Seminar werden verschiedene Methoden zur intuitiven sensomotorischen Koordination und Interaktion zwischen Menschen und Robotern oder anderen interaktiven Geräten vorgestellt, und anhand von aktuellen wissenschaftlichen Publikationen untersucht. Der Schwerpunkt liegt auf dem Interaktionsverhalten.
Die Lehrveranstaltung besteht aus einem wöchentlichen Seminarteil mit Vorträgen in der ersten Semesterhälfte und einem praktischen Teil als Blockseminar, in dem die Methoden aus den Publikationen mit Soft- und Hardware (Beschleunigungssensoren, pan-tilt Kameras, Aibos) implementiert und getestet werden.
SE Mo 13-15 wöch. RUD 26, 1’307
Die Anmeldung funktioniert über Goya.